|
The
Gait Debate:
 In
Ceratopsid dinosaurs, the forelimbs and hind limbs are
nearly equal in length, identifying them as obligate
quadrupeds. This premise is supported by their short,
slender tail, which clearly did not act as a counterbalance
to walk. Also, the presence of ossified tendons only in the
hip region and a pelvis fused to the backbone along 10
sacral (lower back) vertebrae, rather than 4 or 5 that are
typical of other dinosaurs, supports their quadrupedal
posture (Lucas, 1994). In
Ceratopsid dinosaurs, the forelimbs and hind limbs are
nearly equal in length, identifying them as obligate
quadrupeds. This premise is supported by their short,
slender tail, which clearly did not act as a counterbalance
to walk. Also, the presence of ossified tendons only in the
hip region and a pelvis fused to the backbone along 10
sacral (lower back) vertebrae, rather than 4 or 5 that are
typical of other dinosaurs, supports their quadrupedal
posture (Lucas, 1994).
These
characteristics suggest stability and power walking. The
massive four-toed hind limbs are broad and hoofed, and the
deep rib cage supported its massive shoulder girdle and
forelimb.
As
the title suggests, there has been much debate over the
stance of the Ceratopsids. Many believe both the fore and
hind limbs were positioned upright. Others suggest that the
forelimbs were sprawling or semi-sprawling. One theory
supporting the sprawling posture is derived from examination
of the shape of the leg bones. When these bones are compared
to those of modern lizards (sprawling), and to those of
modern rhinoceros (upright), they more closely resemble
those of the lizard and hence suggest a sprawling gait.
Others believe that evidence found in Ceratopsian tracks
indicates neither an upright nor a sprawling posture, but
rather an intermediate and bow-legged stance. Unfortunately
the evidence is inconclusive either way, and this debate
remains unresolved (Lucas, 1994).
|
(Sims,
1994)
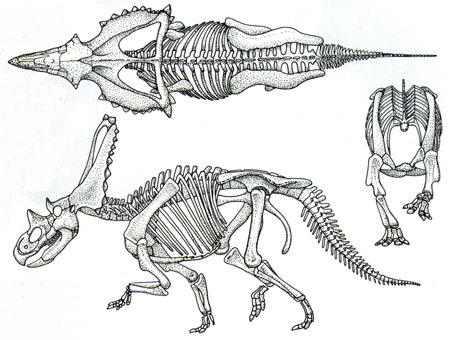
There
is much debate surrounding the Ceratopsian gait. Figure
portrays dorsal, lateral, and posterior views of the stance
of Chasmosaurus
 (Walters,
1996) (Walters,
1996)
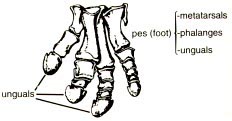
Hind
foot structure of a ceratopsid
 (Walters,
1996) (Walters,
1996)
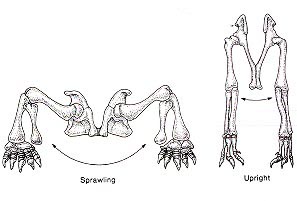
Forelimb
gait debate. Left: sprawling/semi-sprawling gait. Right:
upright gait.
 (Sims,
1994) (Sims,
1994)
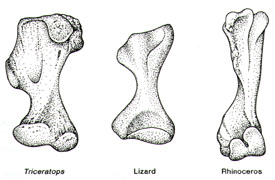
When
the humeri of a living Komodo dragon (middle), a living
rhinoceros (right), and a Triceratops (left) are
compared, it is easy to see that the ceratopsian most
resembles the lizard humerous, corresponding to a
sprawling/semi-sprawling gait (Lucas, 1994).
|
